Mice and larvae tracking using a particle filter with an auto-adjustable observation model PISTORI, H.; ODAKURA, V. V. V. A.; MONTEIRO, J. B. O; GONÇALVES, W. N.; ROEL, A. R.; SILVA, J. A.; MACHADO, B. B. Pattern Recognition Letters, v. 31, p. 337-346, 2010.
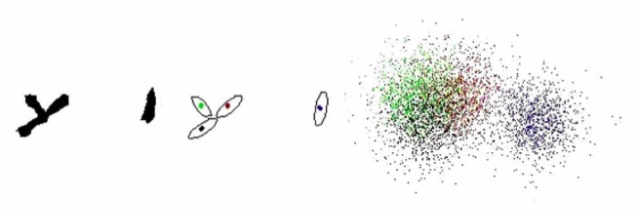
This paper proposes a novel way to combine different observation models in a particle filter framework. This, so called, auto-adjustable observation model, enhance the particle filter accuracy when the tracked objects overlap without infringing a great runtime penalty to the whole tracking system. The approach has been tested under two important real world situations related to animal behavior: mice and larvae tracking. The proposal was compared to some state-of-art approaches and the results show, under the datasets tested, that a good trade-off between accuracy and runtime can be achieved using an auto- adjustable observation model.